・粉体・砂利・破片など含む材料を扱う設備回りの堆積物清掃は大変ではありませんか?
・清掃のためのコストが高いと感じていませんか?
・清掃時の姿勢が悪くなるような場所の清掃に苦労していませんか?
Point01 LiDAR*センサを搭載し、自己位置認識技術としてSLAM**を採用
Point02 障害物を自動で回避して走行可能
Point03 清掃動作をプログラミングすることにより、粉じん寄せ集め作業を完全自動化
Point04 汎用台車を利用、ブラシは対象に応じて交換可能など、柔軟性が高い
* LiDAR: Light Detection And Ranging、レーザを用いた3次元距離センサ
** SLAM: Simultaneous Localization And Mapping、測位センサと地図データに基づく自己位置認識方法
・ベルトコンベア脇など運搬時落下物が発生するエリアの清掃
・粉状材料加工設備周りに粉塵が堆積するエリアの清掃
・堆積物による環境悪化を回避したいエリアの清掃

 メタバース
メタバース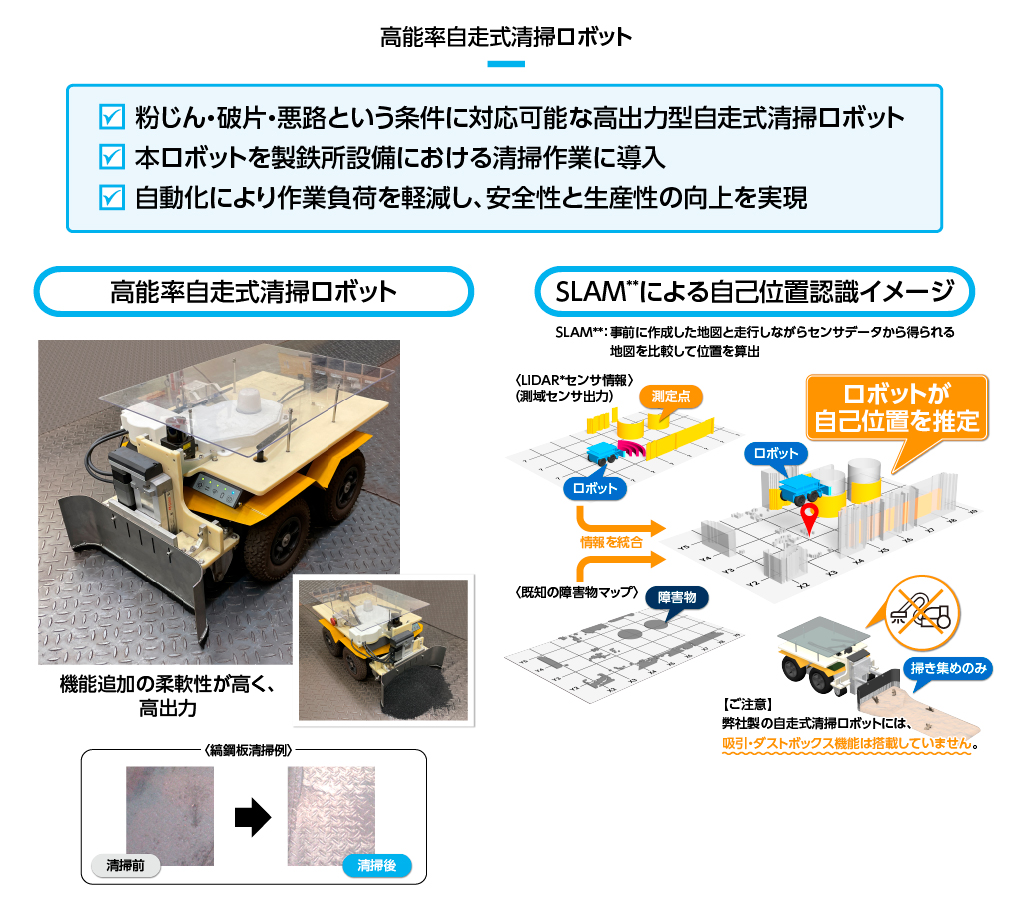


 ソリューションビジネスの
ソリューションビジネスの