商品分野
需要分野
ソリューションビジネス
形状不良の削減技能伝承の実現歩留まり向上生産性の向上
データサイエンス
圧延オペレータの属人的な形状制御操作からの脱却
Solution Point
Features 01
Features 02
Features 03
Links 01
■お困りごと を相談する
トータルソリューション
■ 技術課題 から探す
技術課題
■ 多用途技術 から探す
多用途技術
■ 鉄鋼技術 から探す
鉄鋼技術
■ メタバース から探す
保全ソリューション

 メタバース
メタバース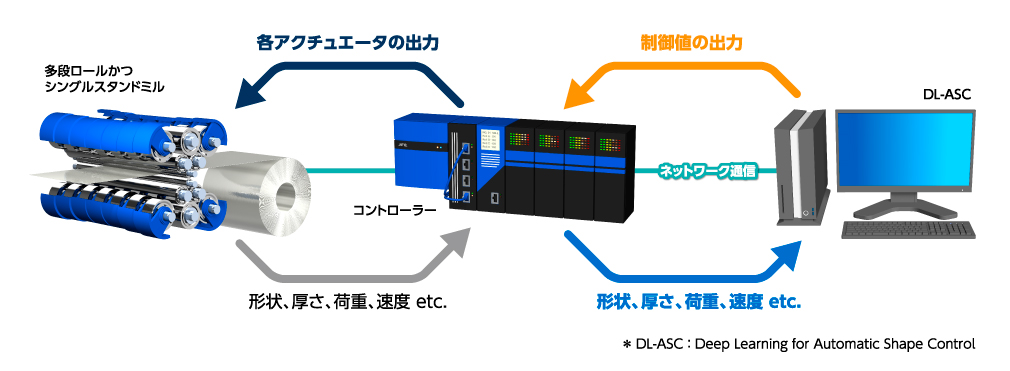


 ソリューションビジネスの
ソリューションビジネスの